走査プローブ顕微鏡像のドリフト補正
(初稿:2009年9月2日,更新日2009年9月4日) お持ち帰り用pdf版はこちら
1.はじめに
走査プローブ顕微鏡(SPM)像から表面構造を解析する際にどこまで精密に構造決定できるかは,その像の分解能や質によるが,その像をどこまで解析できるかにもかかっている。この構造解析において問題になってくることのひとつに,顕微鏡探針と試料表面との位置関係の時間的なずれ,すなわち「ドリフト」がある。理想的な実験環境を実現すれば,ドリフトを最小にすることができるが,それでも構造決定の際に無視できるまでドリフトを抑えることは困難な場合が多い。
シリコン(111)表面7×7構造の走査トンネル顕微鏡(STM)像を最初に報告したBinnigらの有名な論文[G. Binnig, H. Rohrer, Ch. Gerber, and E. Weibel: Phys. Rev. Lett. 50 (1983) 120.]では,非線形ドリフトがマニュアルで補正された像が示されている。この像のドリフト補正はパソコンで行ったものではなく,STMから得られた表面形状をXYプロッタに出力した等高線プロットを厚紙に貼り付けてからハサミで切り出し,これらの厚紙を重ねて等高線マップを作製する際に,STM像の単位格子がひし形になるようにおのおのの厚紙の位置をずらすことで非線形ドリフト補正がなされている[Ch. Gerber: private communication.]。
このように表面構造の単位格子が既知の場合には非線形ドリフトでも補正することが容易にできる。しかし,単位格子が未知の場合にはこのような補正を行うことはできない。そこで本稿では,単位格子が未知のSPM像をドリフト補正するための方法を説明する。なおここでは,ドリフトが線形である場合についてのみ扱う。
2.ドリフト補正のためのSPM像
単位格子が既知なSPM像であれば,前述のように一枚の像からドリフト補正を行うことができる。しかしそうでない場合には,少なくとも二枚以上,かつ連続して撮った像が必要である。この際に,連続する像の測定条件が変化していないことが重要となる。
また非線形ドリフトを抑えるために,SPMを走査するピエゾに急激な変化を与えないようにすることも重要である。通常行われているSPM観察では,走査開始点が常に同じ相対位置になっている設定で行っている場合が多く,このときには走査終了から次の走査開始までの間に探針位置が試料に対して急激に変化することになるので,走査開始初期段階においてピエゾに由来する非線形ドリフトが起こりやすく,特にこの非線形ドリフトは百ナノメートル四方以上の広範囲を観察するときに起こりやすい。このような非線形ドリフトを避けるには, Y方向の走査が交互に変わるように設定すればよい。すなわち,Y方向の走査方向が下向きの場合,次の像の走査開始は下辺から上方向へのY方向走査となるように設定する。このように走査することで,走査終了から次の像の走査開始までに探針位置が急激に変化することがなくなる。更に第4章で示すように,ドリフト補正をより簡便に行うことが可能になるという利点もある。次章では通常のSPM観察の走査条件でのドリフト補正法を示すが,より精密かつ簡便なドリフト補正を行うには,第4章で示した方法が望ましい。
3.ドリフトベクトルからの補正
連続する二枚のSPM像からドリフト補正するための手順をFig.1に示す(像のサイズ: 19.2 nm × 19.2 nm,走査速度: 535 nm/s)。まず連続する二枚の像内で欠陥など目印になる点に着目する。着目した欠陥を図中に×印で示す。そして着目した欠陥の位置がどれだけずれたかを求める。求めたドリフトベクトルを図中に矢印で示す。なおこの観察では,ここで示した連続する二枚の像を観察する間にY走査が逆方向で観察した像を観察していたためにドリフトは二倍になっているので,求めるドリフトベクトルの大きさはこれらの像から得られたドリフトの半分である。こうして求めたドリフトベクトルをX軸方向とY軸方向の成分に分解する(X: 4.17 nm,Y: 1.60 nm)。そしてY軸方向のドリフトの分だけ像の縦方向を伸縮する (19.2 + 1.60 = 20.8 nm)。最後にX軸方向のドリフトの分だけ像全体を平行四辺形に歪ませるが、その歪み角は,X軸方向のドリフト距離を像の一辺の長さで割った値の逆正接となる(arctan(4.17/19.2) = 12.3°)。以上のようにして,連続する二枚のSPM像からドリフト補正を行うことができる。

Fig.1. Schematic showing how to compensate STM image from two consecutive images of phthalocyanines on graphite surface. The starting point of scan, scanning speed, bias voltage, tunneling current, and the other parameters for imaging were the same on the both images. The drift vector was estimated from the translation of a defect. Then the image was stretched according to the Y component of the drift vector, and was distorted to a parallelogram according to the X component of the drift vector.
ここで示したドリフト補正方法は,
i) ドリフトによって見かけのドリフト量自体が歪んで測定されていること,そして
ii) X軸(高速走査軸)方向にも像がゆがむこと,
の二つを無視した近似的な方法である。この近似は、X軸(高速走査軸)方向のドリフトが走査速度に比べて非常に小さいときに成り立つ。また,X軸方向の像のゆがみはY軸方向のゆがみの1/2N
(N: 像の走査線数)程度であり,ドリフトによってドリフトベクトル自身が不正確に測定されている影響は,誤差の二次の項になるので,実用上はどちらも無視できる。実際のSPM像測定において,この近似が成立しないぐらいにX軸(高速走査軸)方向のドリフトが大きい場合には,分子像を観察することは不可能である。
4.簡潔なドリフト補正法
前章に示した方法でドリフト補正を行うことができるが,そのためにはドリフトベクトルを求めることが必要となり,手順も複雑である。そこで本章ではより簡潔なドリフト補正方法を示す。このドリフト補正を行うには,連続する二枚以上の像が必要なだけでなく,その連続する像の走査のY軸方向が互いに逆になっていることが必要になる。
ドリフト補正前の二つの像をFig.2の上段に示す。右の像はup-scanで観察したものであり,左の像は右の像を観察した直後にdown-scanで観察したものである。したがって,この二つの像の上辺はほぼ同じ時刻に測定されたことになる。一方,それぞれの像の下辺は一画面の測定時間分だけ上辺よりもそれぞれ前あるいは後に測定されたことになる。
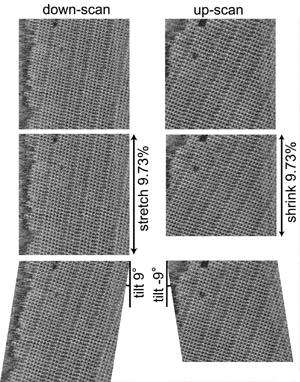
Fig. 2. STM images of phthalocyanines on graphite, showing the process of drift compensation from a pair of the images with down-scan and up-scan. The concept of the drift compensation can be understood by imagining that you are observing rain drop trajectory (drift vector) from an elevator through a glass window (up-scan and down-scan).
ここで上段の二つの像の格子間隔のY軸成分を比較すると,右側のup-scanの像は左側のdown-scanの像よりも縦に伸びた像になっていて,逆に左側のdown-scanの像は縦に縮んだ像になっている。そして,観察されている格子像のストライプ列の角度を比較すると,右側のup-scanの像は左側のdown-scanの像よりもストライプ列が斜めになっているのに対して,逆に左側のdown-scanの像のストライプ列は垂直に近づいている。これらは,ドリフトベクトルのY軸成分が像の上から下の方向になっていることと,X軸成分が像の左から右の方向になっていることを示している。ということは,補正によって左の像の下辺をあるベクトル分だけ移動する必要があるならば,右の像の下辺は同じ分だけ「逆方向に」移動する必要がある。すなわち,対になっている二つの像の上下伸縮の度合,そして平行四辺形に像を傾けたときの角度,のそれぞれにおいて「平均値」をとれば,ドリフトは互いに相殺されるので,ドリフトベクトルを求めなくてもドリフト補正ができる。
このことを利用して行ったドリフト補正操作の具体例をFig.2に示す。まずY軸方向について,縦に縮んでいる像の伸長と,逆に縦に伸びている対の像の収縮を,共に同じ比率(9.73 %)で行って,図の中段に示したように,像内の格子の縦方向の長さが同じになるようにする。そしてX軸方向については,互いに逆方向の角度で平行四辺形に歪ませて(9°),像内を斜めに走る格子列が同じ角度になるようにする。以上の操作により,前章で示したようにドリフトベクトルを求めなくても,ドリフト補正ができる。また,点欠陥が像内にない,または観察中に欠陥の変化や移動が起こっていても,この場合なら問題なくドリフト補正ができる。更に,単位格子の大きさや角度を求めたいだけの場合には,Fig.2に示した画像補正処理を行わなくても,二つの像からそれぞれ求めた単位格子の大きさや角度の平均値を計算するだけで,ドリフト補正がされた値を求めることができる。
5.おわりに
本稿では,SPM像のドリフト補正について具体例を示しながら説明した。このように未知表面構造の像のドリフト補正を行うには,ドリフトが線形であることと,連続する二枚以上のSPM像が必要である。そして簡便にドリフト補正を行うためには,連続するSPM像のY走査方向が交互になるようにすることが望ましいことも説明した。このようなSPM像走査設定は現在市販されている既存のSPM制御ソフトの多くで可能になっている。
既存のSPM像解析ソフトには,既知の格子を元にドリフトを補正する機能を持つものもあるが,本稿で示したドリフト補正を行えるソフトは筆者の知る限りではまだ存在しない。しかし,このような像補正は市販の画像処理ソフトで簡便に行うことができる。
本稿がSPM像の解析を行う読者の一助になれば,筆者としては嬉しいかぎりである。